DuPont M2 Software Documentation
The Observatories of the Carnegie Institution for Science (Carnegie Observatories), Pasadena, CA
Version 1.3
Christoph C. Birk (birk AT obs DOT carnegiescience DOT edu)
The Observatories of the Carnegie Institution for Science (Carnegie Observatories), Pasadena, CA
Version 1.3
Christoph C. Birk (birk AT obs DOT carnegiescience DOT edu)
Location of this document: http://instrumentation.obs.carnegiescience.edu/Software/DuPont/dupontm2.html
2024-12-12: The code has been moved to GitHub
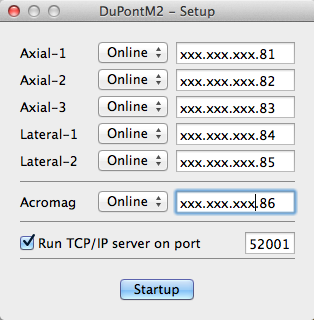
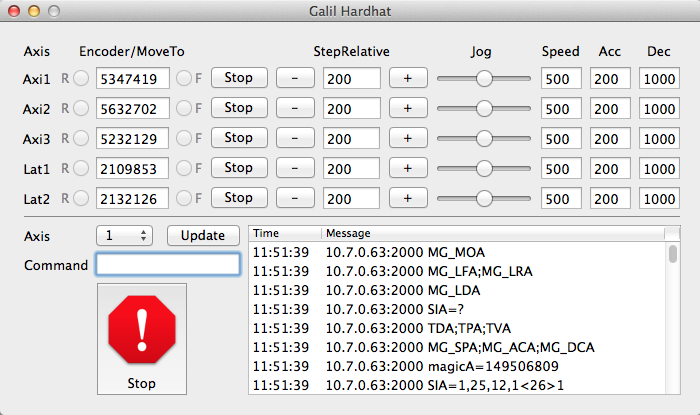
Set the online status and IP numbers of the
Galil motor controllers and the Acromag digital
I/O device.
The TCP/IP server
should run on its default port (52001).
Instrument Software Documentation Index
2016-03-21, Christoph C. Birk, Carnegie Observatories